
OASYS – Ocean-Air synoptic operations using coordinated autonomous robotic SYStems and micro underwater gliders
One of the barriers towards a better understanding and sustainable development of marine related economic activity is the high cost associated with ocean observing systems. Autonomous robotic systems are steadily revolutionizing the way we obtain data and interact with the ocean. However most of existing autonomous systems still require the involvement of manned missions in the deployment/recovery phases which represents a high percentage of the total operational costs.
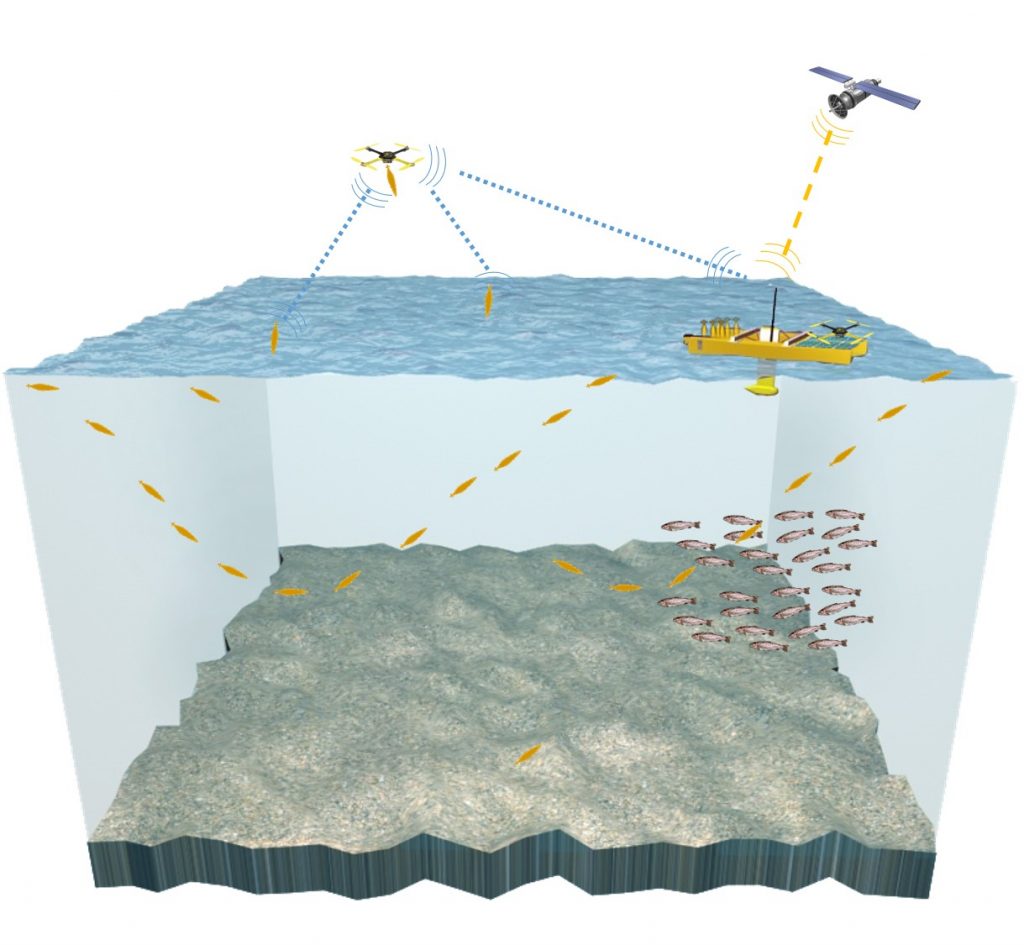
The OASYS project will develop and demonstrate an innovative type of fully automated Ocean-Air coordinated robotic operation that has the potential for drastically reducing the cost of ocean observing systems. The project proposes the development of a swarm of low cost Micro Underwater Gliders (MUGs) that can operate autonomously with the support of Unmanned Aerial Vehicles (UAVs) and Unmanned Surface Vessels (USVs) for deployment, recovery, battery charging, and communication relay. The system reduces human intervention to the minimum, revolutionizing the affordability of a broad range of surveillance and data collection operations. Two different mission scenarios are proposed: In the first, base stations are located onshore, or on existing offshore platforms. This scenario suits coastal monitoring, and continuous environmental monitoring around oil and gas offshore platforms. In the second scenario, a long endurance wave powered USVs serves as base station for UAV and a swarm of MUGs. This allows to extend existing long range USVs with the possibility of adding persistent synoptic observations in the water column at a fraction of their cost.
The technologies developed through the project will enable the creation of future products, solutions, and scientific research, related to the commercialization of the autonomous observing systems and the generated data. The proposed observing systems will be demonstrated during sea trials in Trondheim fjord and in a tidewater glacier in Svalbard, Norway.
Project duration: 2018-2021
Project funding: 1.036.000 €
Project coordinator: OsloMet